1、开箱装配:
开箱后主要有以下这些部件:
主机(含USB连接线1根) 1
机头(含推力风扇2只,舵机一只) 1
步进电机(含机座2只) 2
卷扬轮(含吊线1根) 2
12V电源适配器(含电线1根) 1
步进电机连接电线 (4芯) 2
机头连接电线(5芯) 1
使用说明书 1
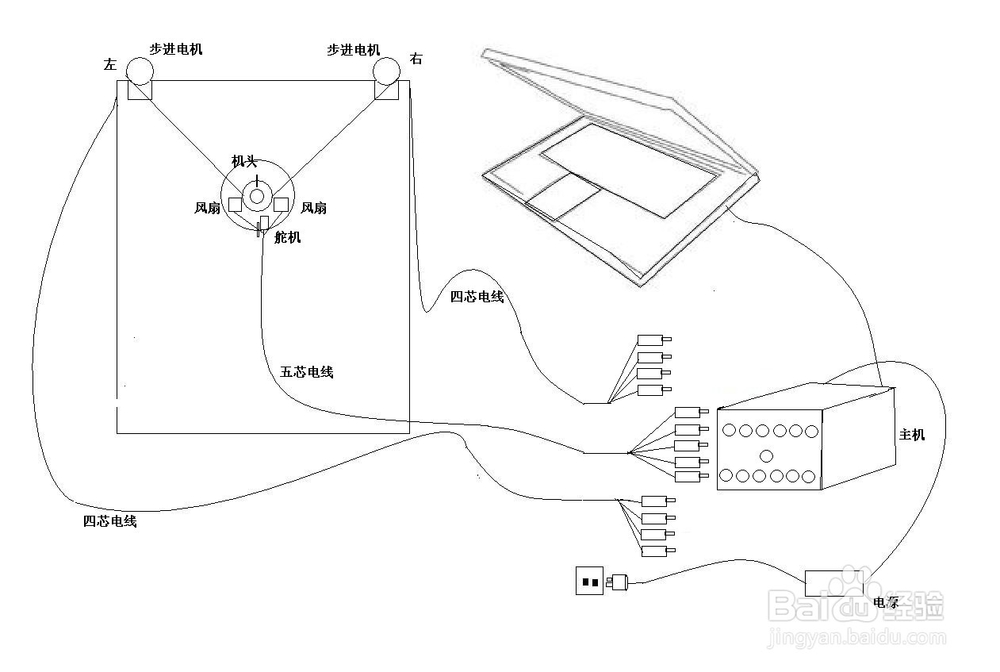
可按下列图示进行装配:
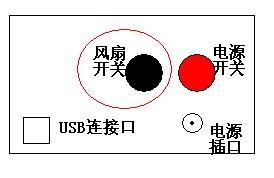
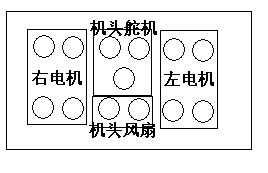
香蕉头端口可按对应的颜色进行连接。其它种类的插口有方向匹配卡口,以保证不会插反。步进电机可以连接任何一根四芯电线,只在连上主机时,才有左右之分。

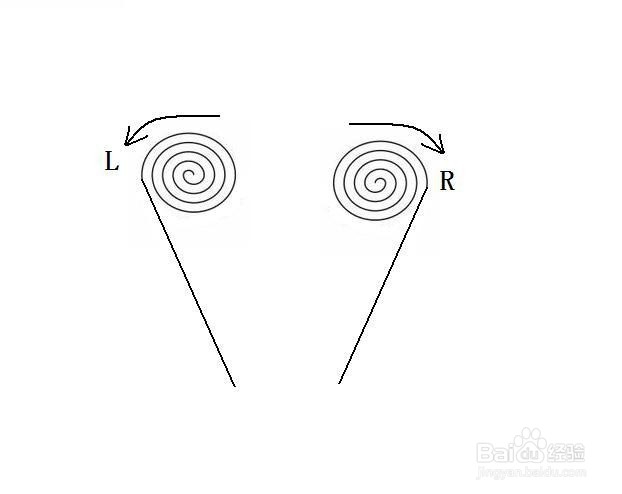
2、当面对画板时,可以用虎钳或夹子将电机座固定住,此时,步进电机在卷扬轮的后面,请确保左右卷扬轮上的绕线方向如图所示:

3、当面对墙壁时,可以利用撑杆柱进行安装,此时步进电机位于卷扬轮的前面,请确保左右卷扬轮上的绕线方向如图所示:(最简单的撑杆制作方法,用方木柱上下顶紧即可)


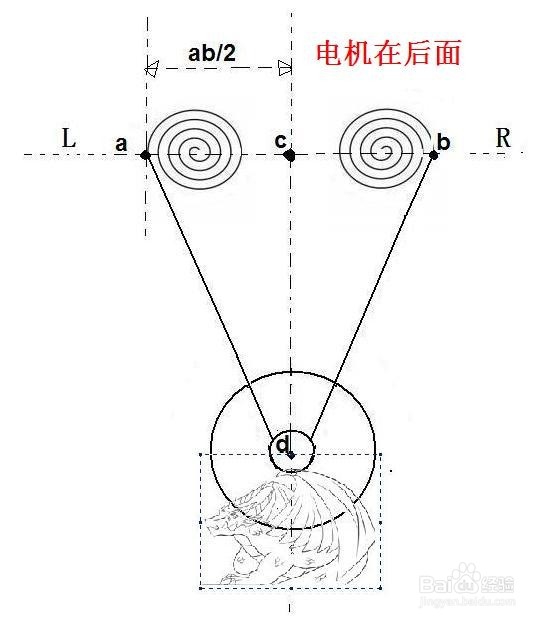
1、画图的时候,必须告诉机器人一些参数,才能工作。当机器人安装好了以后,接下来就要测量和确定这些参数了。 测量并记录图示中的ab点和cd点距离(mm),这两个值会影响绘画精度,请尽可能精确测量。注意电机在前和电机在后的ab点取值方法略有不同哦:
2、当步进电机在卷扬轮后面时按下图取ab点:
3、当步进电机在卷扬轮前面时按下图取ab点:

4、c点位于ab点的二分之一处,d点一般是绘画时图案的上边线的中点,可以预设在cd线上的任意位置,但是d点距离C点过近时,绘画中步进电机会滑步或导致线条严重波动。请适当延长cd线长度,以确保步进电机有足够的扭力吊起机头。如图:

1、系统要求: 32位的WIN7
2、软件下载地址:http://pan.baidu.com/s/1b0On1c
3、安装设备驱动:
打开文件HL340.EXE,用USB线把主机与电脑相连,打开HL340.EXE文件,按“INSTALL”按钮,直到弹出完成窗口以后,点击“确定”按钮,完成安装。注意:按下INSTALL按钮前要先用USB线接好主机哦


4、安装dragonfly绘画软件:
Dragonfly是绿色软件,将“dragonfly_少文件版win7_32位”或者“dragonfly_多文件版win7_32位”文件目录拷贝至你选定的硬盘位置即可,无须安装。电脑内存比较小的用户,使用多文件版,可以提高运行速度。

5、用USB线连接好电脑和机器人。双击打开“dragonfly_少文件版win7_32位”或者“dragonfly_多文件版win7_32位”文件目录中的dragonfly.exe文件,如果遇到杀毒软件的误告,请忽略:

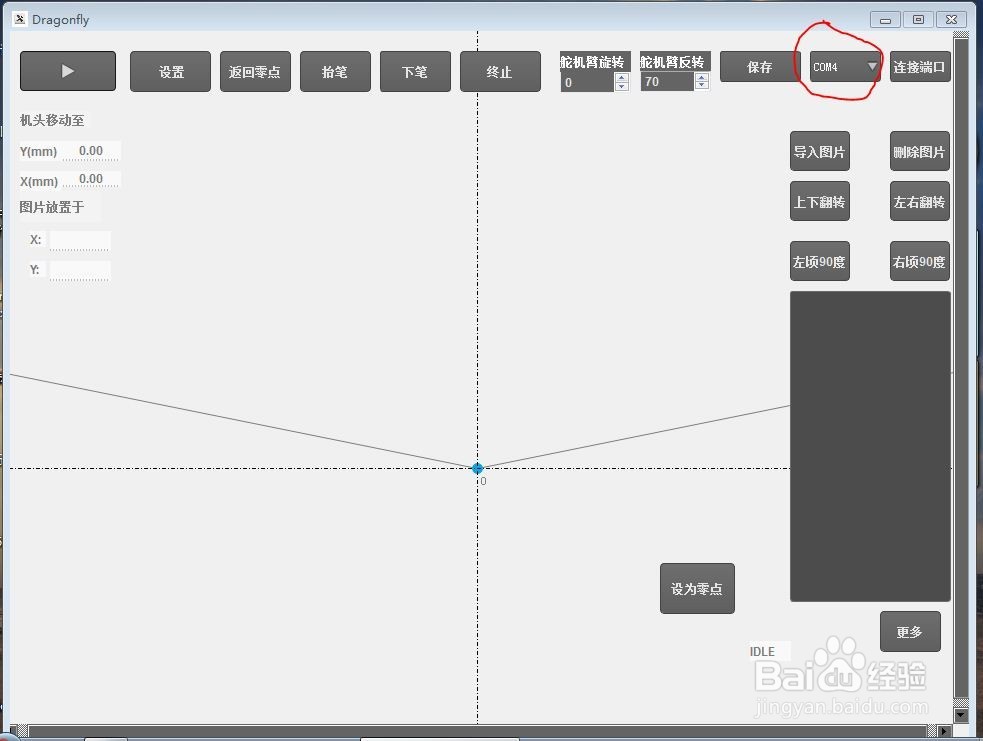
6、选择绘图仪所连接的端口,(可以到设备管理器中查看机器人连在哪一个口)。选好以后,点击设置


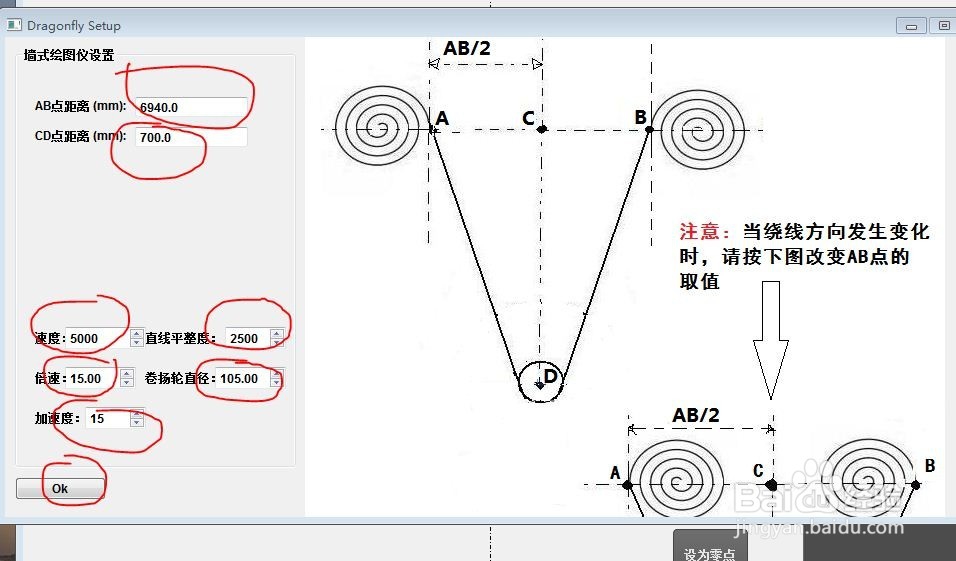
7、填写测量好的ab点距离和cd点距离,左下方还有5个参数,将会影响画幅的大小、质量以及绘画速度。
卷扬轮直径:小墙版的卷扬轮直径是40 (mm), 大墙版的卷扬轮直径是105(mm)
速度:控制机头的移动速度,数字越大,速度越快。
加速度:控制机头走空笔时在起步时的提速和止步时的减速,数字越大,电机急走急停的趋势越明显
直线平直度:画幅很小时(不超过以零点为圆心,半径500mm-700mm的范围)设置为1即可,画幅较大时,画面中的长线会变成一条长弧线,这时,可以把直线平直度数字跳上去,以便把一条长弧度切割成若干个小弧度来换取相对平直的一条线,数字越大切割出来的小弧度越细,线就越平直,画面质量就越高,但速度会变慢。直线平直度的取值代表了以画幅宽或高(取较大的)的几分之一为单位来切割直线。比如:画副宽500mm,高700mm,直线平直度设为50,那么直线将以每14mm一个小弧度的形式出现(高/平直度)。
倍速:倍速有两种用法:1、用来倍增速度:当卷扬轮直径参数和实际卷扬轮直径一致时,倍速值放大,速度会倍增。2、用来放大画面:倍速为1时,取值用小直径而实际用大直径的卷扬轮,可以放大画幅,实际直径比填写的直径大几倍倍,画幅就放大几倍
填写好参数,按OK按钮,设备会自动连接端口,向机器人传递参数,并把这些参数保存起来,下次打开dragonfly,没有变化的参数就不需要再填写了。
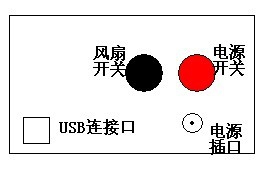
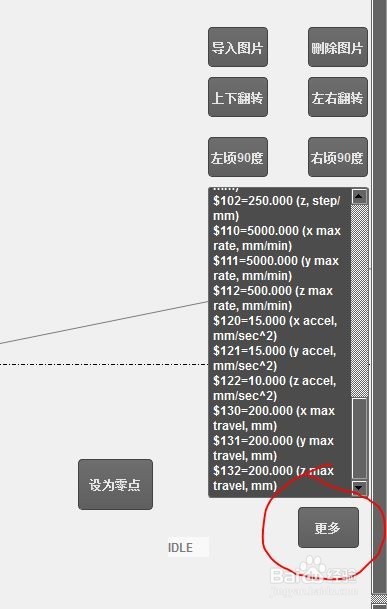
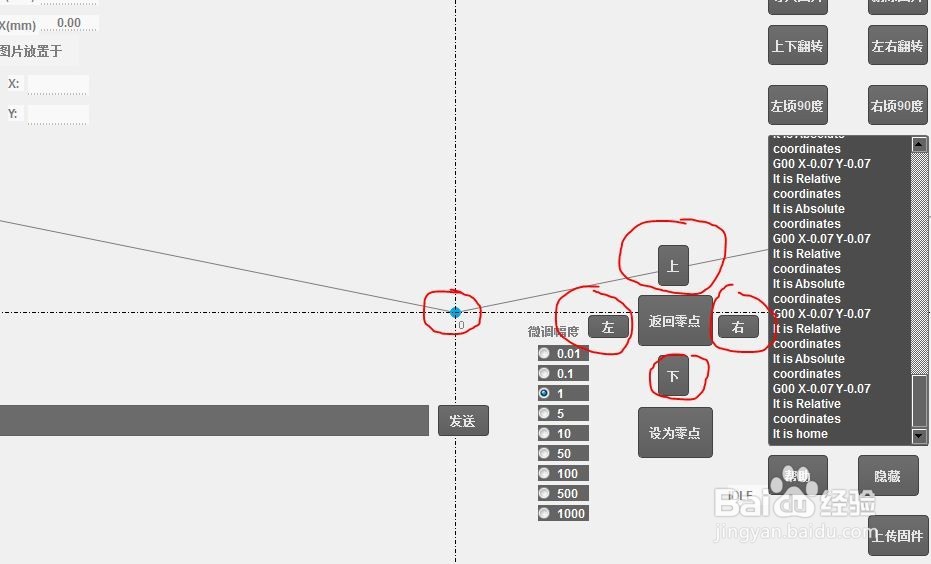
8、观察右侧的信息框,当白色字跳完不动时,(如图)就可以用dragonfly控制机器人了,点击“更多”按钮,会出现十字方向按钮和微调幅度选项,此时打开机器人的红色电源开关。用十字方向按钮配合微调幅度选项控制机头移动,直到笔头与画板或墙面上设置的零点(d点)重合。
9、点击设为零点按钮,告诉机器人坐标原点就定在这里了

10、起落笔设置和笔头安装:将笔装入机头笔筒固定好,笔尖略高于机头撑脚,调整界面中舵机臂旋转和反转的数字,并用抬笔和下笔按钮实验,使机头达到“抬笔时笔尖离开立面,下笔时笔尖顶在立面”的效果。按保存按钮可以将这这两个参数保存起来。如图:

11、dragonfly支持SVG矢量图、bmp位图以及用文泰雕刻软件生成的2维nc文件。点击导入图片按钮,可以选择需要的图片或文件。

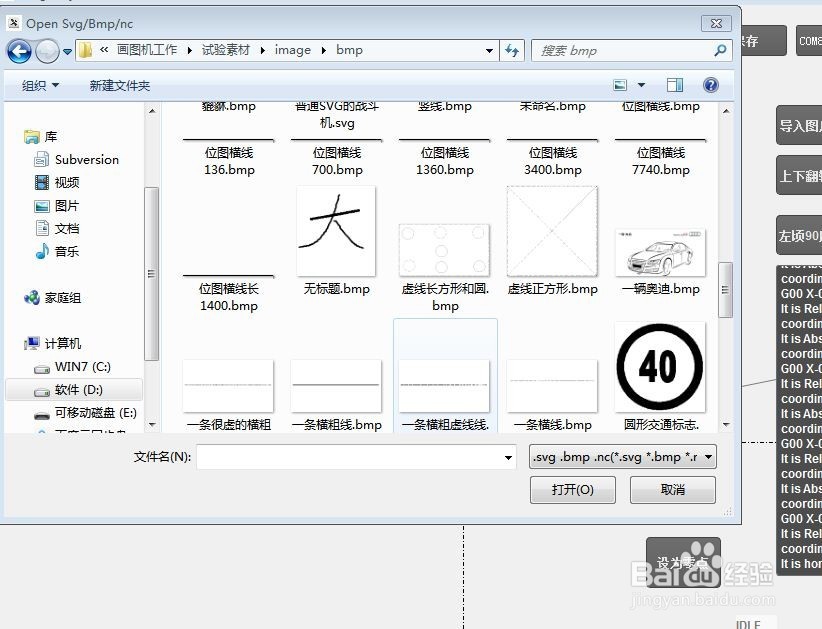
12、先介绍SVG矢量图和BMP位图的导入:
如果是SVG矢量图,会直接被载入到机器人的坐标场景上,如果是BMP位图,会出现转化窗口,需要转化为SVG矢量图,再载入到机器人的坐标场景里,转化好的SVG矢量图会自动保存在BMP位图所在的文件目录里以备下次直接导入。
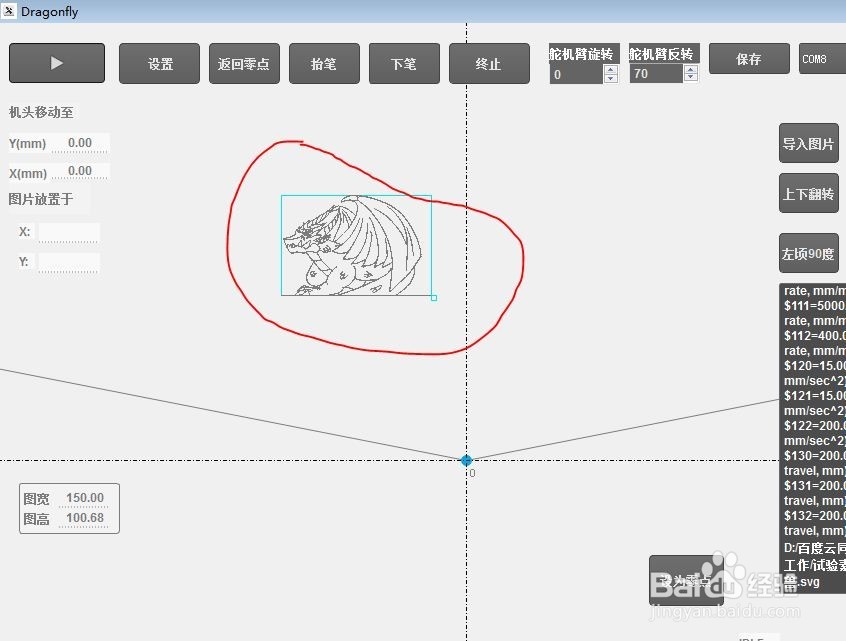


13、可以用鼠标来缩放图片,但当画幅较大时,会受到界面的限制,此时,可以通过键盘输入的方式来处理:
更改“图宽”或“图高”的值,来缩放图片的大小(mm),比如将图宽改为5000,那么画出的宽就是5000mm,而图片的高度会按照原来的宽高比放大。如图:

14、可以用鼠标来移动图片位置,但当画幅较大时,会受到界面的限制,此时,也可以通过键盘输入的方式来处理:更改“图片放置于”的X值和Y值,将图片的左上角定位到指定的位置(mm),比如X设为-3000,Y设为-50。那么绘画时画面的左上角就会被定位在距离笔头左面3000mm远,低于笔头50mm的地方,如图:

15、指定图片位置的时候,一般把图片定位在其上边线的中点恰好与坐标原点重合的地方。以便画面居中于墙面或画板。当然也可以偏移,但要保证画面上下左右不要超出墙面或画板的范围,尤其是部分画面在d点之上(Y为正数)时,还要考虑cd点之间需要留白一部分来保障电机的扭力,不宜过分接近ab线

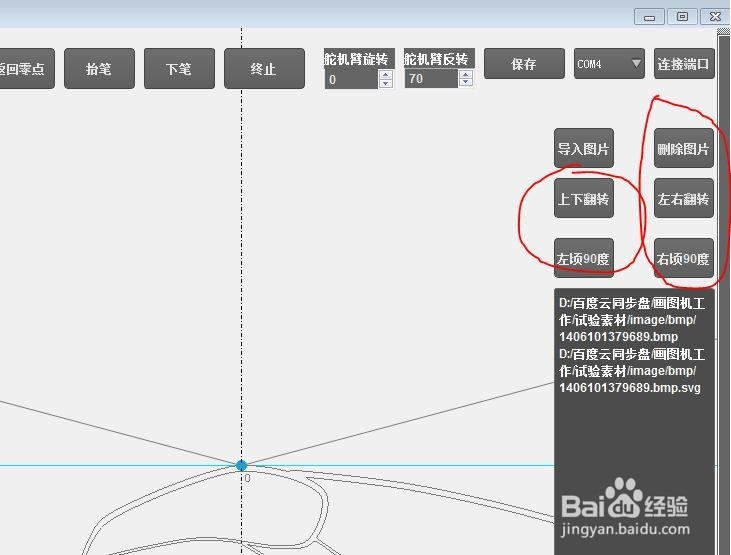
16、界面右边还有对图像进行翻转,镜像的按钮,有需要的时候可以使用
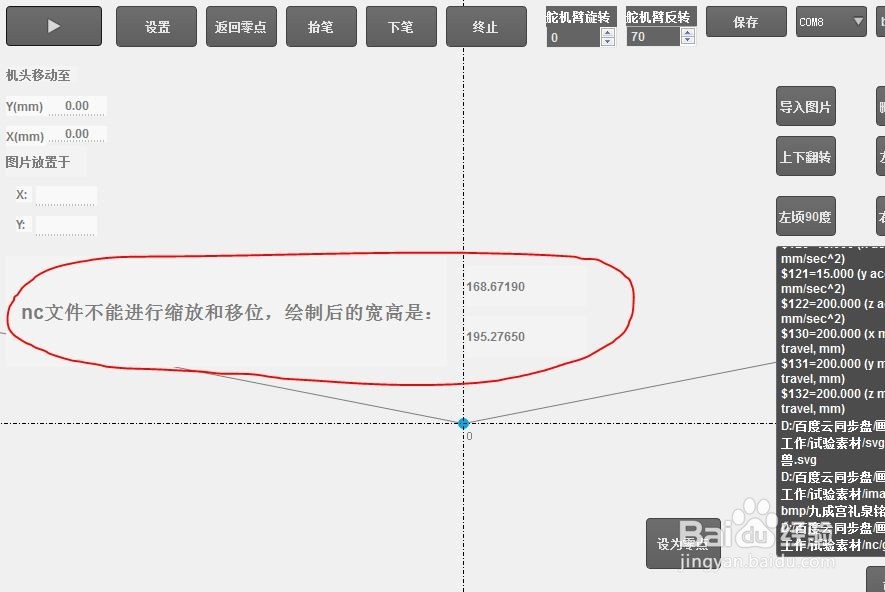
17、导入文泰输出的nc文件时,画面事先在文泰中已被设定好,在dragonfly中是无法调整大小和位置的。因此机器人坐标场景中会有提示,如图:
18、按界面左上角的带三角标志的运行按钮,开始绘画。原按钮会变成暂停按钮。中途可以按暂停,以便更换笔头或加墨水。此时该按钮又变回运行按钮。更换完毕,可以继续点击运行


19、如果发现划出的笔迹比较淡,或者室外风力比较大,影响机头绘画,可以打开机器人的风扇开关,让机头风扇产生的推力帮助笔尖顶住绘画立面。